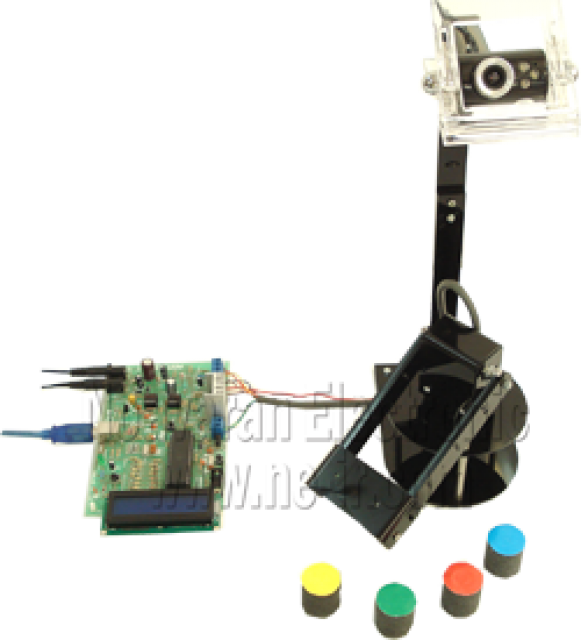



مجموعه ربات بازو یک ربات بسیار پیشرفته در زمینه بازوهای رباتیک می باشد.بازوها معمولا انجام یکسری اعمال تکراری را بر عهده دارند که در این مساله مهمترین نکته دقت قسمتهای مکانکیکی و موتورهای محرک بازو و سیستم های کنترلی آنها می باشد، اما این بازوی رباتیک علاوه بر تمامی موارد فوق ، دارای یک بخش ویژه می باشد که آن را از تمامی بازوهای رباتیک معمول ، متمایز می سازد و آن بینایی این مجموعه می باشد.
این ربات تصاویر محیط را از طریق یک وب کم از محیط دریافت نموده و پس از انجام پردازش بر روی آنها در کامپیوتر فرامین لازم جهت جابجایی اجسام را برای ربات ارسال می نماید. بدین ترتیب دخالت انسان در این فرایند به صورت کامل حذف گردیده و کل عملیات از محل یافتن شی مورد نظر تا جابجایی آن شی به محل مورد نظر به صورت کامل توسط ربات صورت می گیرد. این ربات قابلیت یادگیری خصوصیات شی (از قبیل شکل ، رنگ، اندازه و ...) مورد آموزش به خود را داراست و این به معنی برداشتن گام اول در ساخت یک ربات کاملا هوشمند که وظایف خودرا بدون نیاز به دخالت انسان انجام می دهد می باشد.
 ربات بازو مدل NAR130
ربات بازو مدل NAR130